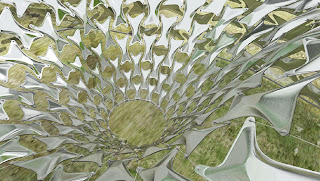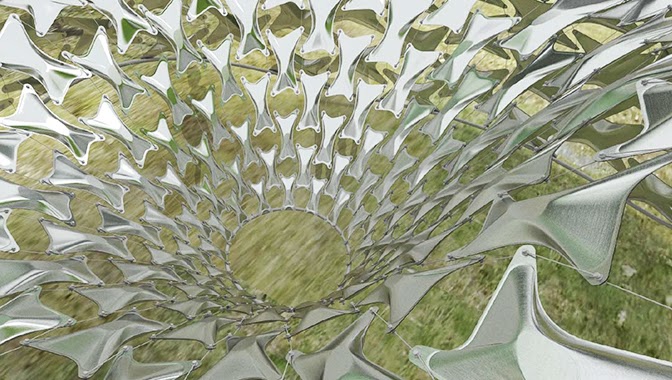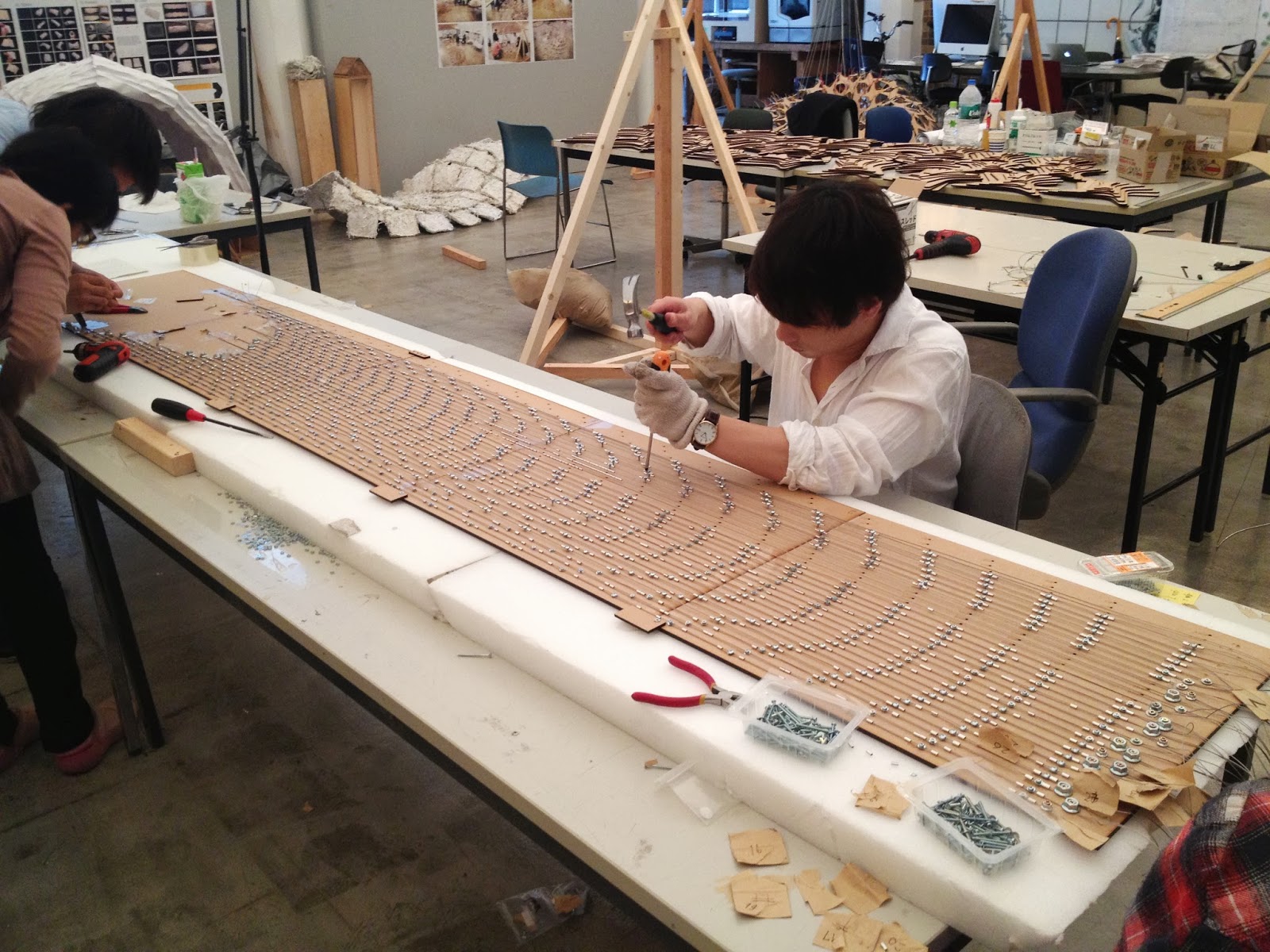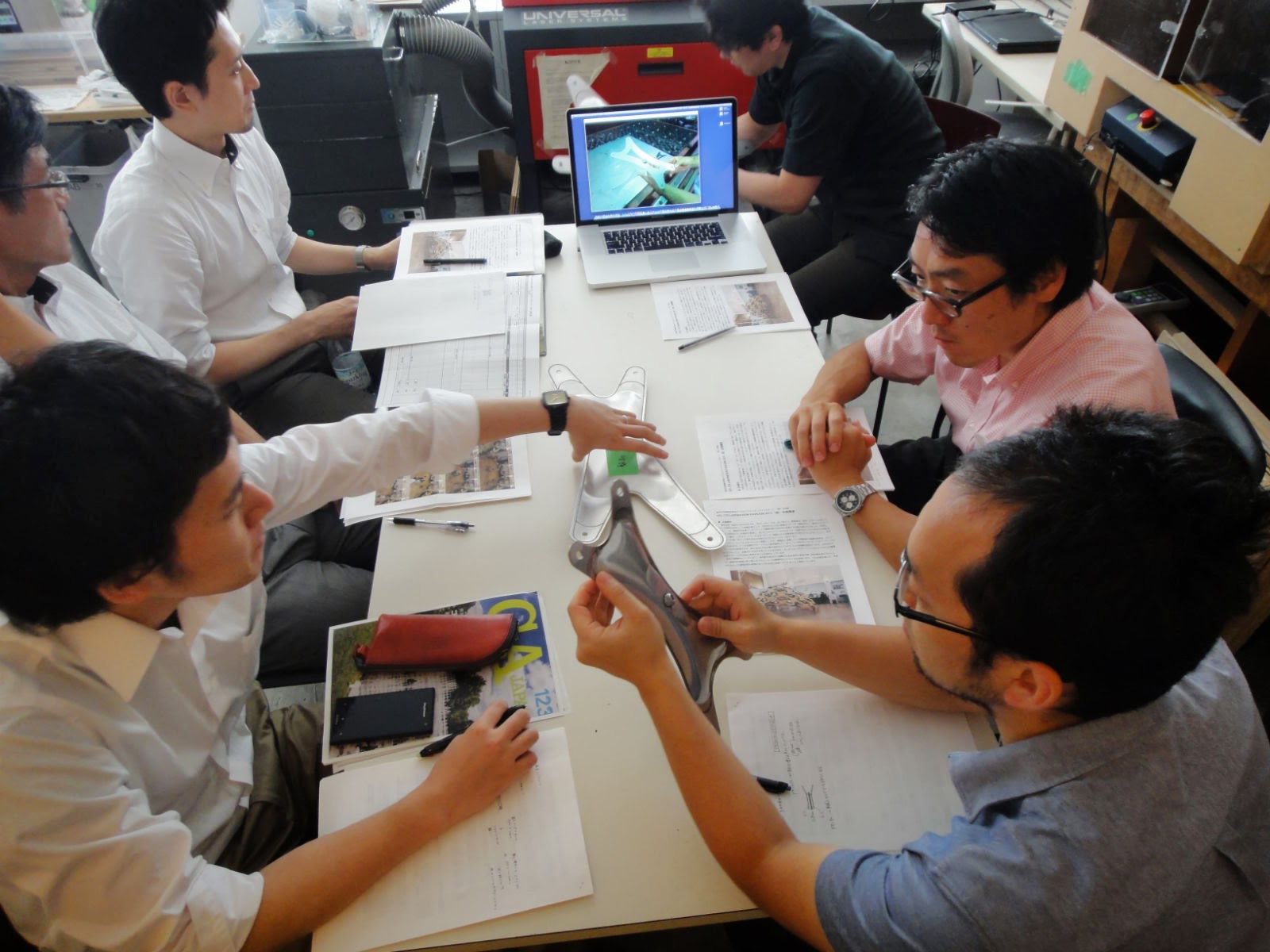
With samples of components produced by Takenaka-san, we had a meeting with the pavilion team from Obayashi Co. The full-scale version of G30 Summer Pavilion will be a network of compression components made of thin sheets of stainless steel, which are welded and inflated using robotic manufacturing machines available at local fabrication shops near the Toyota Motor’s factory.